仿生界新科技:可以军事监视、水下救援的水母
仿生机器人近年来不断取得新的突破和进展,前有费斯托“仿生蜻蜓”惊艳众人,后有各类型仿生水下机器人层出不穷。大多数仿生水下机器人都是通过模拟金枪鱼、鲤鱼等鱼类的游动原理制成。但这类仿生机器人很少能够进行垂直方向上的游动。
近年来,水母凭借其高效、灵活的喷射式推进方式,逐渐成为了仿生学家争相模仿的对象。日前,德克萨斯大学达拉斯分校的研究人员约纳斯·塔德塞(Yonas Tadesse)等人,研发了一种可快速垂直游动,且有一定载荷的仿生水母软体机器人。

该仿生水母软体机器人的运动机制,是通过向下喷射流体产生反作用力,推动其在水环境中进行垂直方向上的运动。

仿生水母软体机器人
研究人员为该机器人配备了八个呈放射状排列的最新型充气式柔性气动复合执行器,并由一台空气压缩机提供动力。该复合执行器由一个单腔室和外层的薄弹簧钢片组成。腔室的主要材料为有机硅胶树脂。外层的弹簧钢是一种不可拉伸材料,但具有良好的回弹效果。当一个力作用在该钢片的一端并突然释放时,钢片能迅速缩回至原来的位置。
充气式柔性气动复合执行器。图片来源:德克萨斯大学
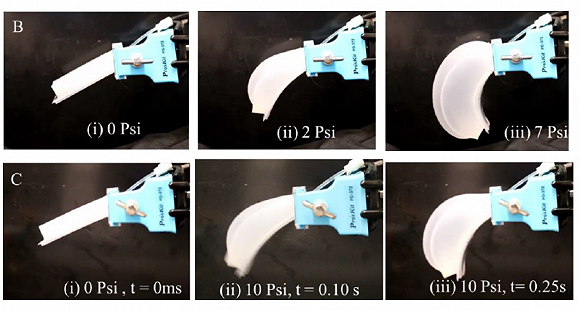
研究人员将复合执行器设计成侧面厚、顶部薄的样式,使空气最大程度地进入腔室。通过压缩机注入空气,执行器可以快速地膨胀并弯曲,产生较大的瞬时推力,实现垂直方向上的快速运动。经测试,直径220毫米的仿生水母软体机器人,在鱼缸中能够承受100克的载荷,并以16厘米/秒的速度垂直游动。
约纳斯称,与以前的仿生水母机器人相比,这款机器人的垂直上升速度是最快的。
该机器人除了可用于军事监视外,未来还可用于水下快速救援、海底探测、资源勘探、水下地形勘测等方面。相比于传统刚性机器人,软体机器人一般采用可变性较大的柔性材料制成,可以实现大尺度连续变形,并任意改变自身的尺寸和形状。因此,软体机器人也被业内视为机器人技术的未来。
此前,科学家们已从水母身上获得过许多灵感。
据环球网消息,去年7月,英国《自然通讯》(Natural communication)杂志发表了一项最新研究,德国马克斯·普朗克(Max Planck)智能系统研究所的梅廷·斯蒂(Metin Sitti)及其同事,发明了一种以钵水母碟状幼体为灵感的软体机器人。

以钵水母碟状幼体为灵感的软体机器人。图片来源:《自然通讯》
该软体机器人全长6毫米,拥有8根腕足,尖端由非磁性聚合物制成,全身被埋入磁性微粒。研究人员将该机器人放在水缸内,并在水缸外部围上电磁线圈。只要操纵磁场,就可无线控制它的腕足收缩再恢复,就像游泳的水母一样。这一无缆软体机器人个头较小,但其具备运输、钻挖等功能。
据高级新闻科学网(Advanced Science News)报道,今年1月,加州理工学院和斯坦福大学的研究人员也发明了一种微型电子半机器人水母。
该研究小组负责人斯坦福大学教授约翰·达比里(John Dabiri )表示,现在大量的研究已转向开发模拟生物的仿生机器人,但给生物体本身配备电子元件,也是仿生机器人研究的一条新途径。

微型电子半机器人水母。图片来源:斯坦福大学
斯坦福大学的研究人员为水母配备了一个微电子控制器,可以发出电脉冲,就像安装了一个心脏起搏器。经测试,配备了微电子控制器的水母,脉冲频率是普通水母的三倍。这使得水母的游泳速度从原来的2厘米/秒提高到4-6厘米/秒。
斯坦福大学研究人员称,该研究尚处于初级阶段,希望未来能研究出一种足够小的电子装置,嵌入水母组织中。除了能控制其游泳速度外,还能操控其运动方向,从而应用于海洋探索。
时间:2020-04-27 23:37 来源: 转发量:次
声明:本站部分作品是由网友自主投稿和发布、编辑整理上传,对此类作品本站仅提供交流平台,转载的目的在于传递更多信息及用于网络分享,并不代表本站赞同其观点和对其真实性负责,不为其版权负责。如果您发现网站上有侵犯您的知识产权的作品,请与我们取得联系,我们会及时修改或删除。
相关文章:
相关推荐:
网友评论: